侧式悬臂堆料机的构造及原理
堆料机是堆场作业中常使用的是一种重要的高效率连续装卸机械设备。它的主要功能是将卸车机卸下的货物堆存到堆场上,方便取料机进行取料作业 。堆料机适用于火力发电厂、水泥厂、港口、矿山、冶金及大型水利工地的储料场,是取运散装物料高效、可连续作业的设备。
为了适应大型矿料、煤料、港口等高度自动化生产的要求,提高工作效率,保证系统的稳定性和连续性。堆料机的发展方向逐渐自动化、智能化,管理技术现代化。通过应用侧式悬臂堆料机的核心控制系统,实现设备无人值守、故障自诊断及远程中控室监控,真正实现料场堆取料机的智能化管理。
侧式悬臂堆料机的构造及原理
1、悬臂部分
悬臂架由两个变截面的工字型梁构成。横向用钢板连接成整体。工字型梁采用钢板焊接成型。 臂架上面安有胶带输送机,胶带机的传动采用电动滚筒。张紧装置设在头部卸料点处,使胶带保持足够的张力,张紧装置采用螺旋张紧。
堆料机的悬臂是进入堆场进行作业的部位,有旋转、俯仰等动作。悬臂前端垂吊两个料位探测仪。当料堆与探测仪接触时,探测仪发出信号, 传回控制室。控制室开动变幅液压系统,通过油缸推动悬臂提升一个预先给定的高度。两个探测仪,一个正常工作时使用,另一个用作极限保护。
2、行走机构
行走机构由三角形门架和行走驱动装置组成。三角形门架下端外侧与一套行走驱动装置(摆动端梁)铰接,内侧与一套行走驱动装置(固定端梁)刚性连接成一体,每个端梁配一套驱动装置,驱动装置共两套。每套驱动装置由一台三合一减速电机驱动。驱动装置实现软起动、延时制动。
3、来料车
来料车由卸料斗、斜梁、立柱等组成。卸料斗悬挂在斜梁前端,使物料通过卸料斗卸到悬臂的胶带面上。斜梁由两根焊接工字型梁组成,横向通过4根大小立柱支撑。大小立柱之间用工字型梁联接,工字型梁和斜梁之间又支撑2根小立柱。这样可保证卸料车的整体稳定性。
4、液压系统
液压系统实现悬臂的变幅运动。液压系统由液压站、油缸组成,液压站安装在三角形门架下部的平台上,而油缸支撑在三角形门架和悬臂之间。5、电缆卷盘
1)动力电缆卷盘由单排大直径卷盘、集电滑环、减速器及力矩堵转电机组成。外界电源通过料场中部电缆坑由电缆通到卷盘上,再由卷盘通到堆料机配电柜。
2)控制电缆卷盘由单排大直径卷盘、集电滑环、减速器及力矩堵转电机组成。主要功能是把堆料机的各种联系反映信号通过多芯电缆与中控室联系起来。
6、操作
堆料机采用三种操作方式,即自动控制、机上人工控制和机旁(维修)控制。 每种操作是通过工况转换开关实现的。
1)机上人工控制 ---- 机上人工控制适用于调试过程中所需要的工况和自动控制出现故障,操作人员在机上控制室内通过控制堆料作业。当工况开关置于人工控制时,自动、机旁(维修)工况均不能切入,机上人工控制可对悬臂上卸料胶带机、液压系统、行走系统进行单独的启停操作,各系统之间失去相互连锁,但各系统的各项保护仍起作用。
2)自动控制 ---- 自动控制是指堆料机实现无人控制,通过监控系统监视堆料机工作的状态。自动控制方式下的堆料作业由中控室和机上控制室均可实施。当需要中控室对堆取料机自动控制时,操作人员只要把操作台上的自动操作按钮按下,然后按下起动按钮,堆料机上所有的用电设备将按照预定的程序起动,整机操作投入正常自动运行作业状态。在中控室的操作台上,通过按动按钮可以对堆取料机实现整机系统的起动或停车。
在自动控制状态下起机前首先响铃,起动顺序是:1)起动悬臂上的卸料皮带机;2)起动液压系统;3)起动堆料皮带机;4)起动电缆卷盘;5)起动行走机构.
7、正常停车顺序:
1)停止上料皮带机;2)停止悬臂上的卸料皮带机;3)停止行走机构;4)停止电缆卷盘。 总之
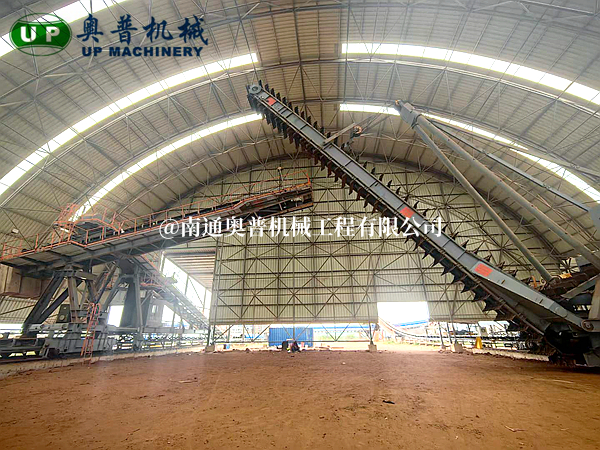
预均化堆场应用于冶金、电力、钢铁、化工和能源等行业,侧式悬臂堆料机是目前预均化堆场中采用广泛的侧面堆料机。
堆料机是堆场作业中常使用的是一种重要的高效率连续装卸机械设备。它的主要功能是将卸车机卸下的货物堆存到堆场上,方便取料机进行取料作业 。堆料机适用于火力发电厂、水泥厂、港口、矿山、冶金及大型水利工地的储料场,是取运散装物料高效、可连续作业的设备。
为了适应大型矿料、煤料、港口等高度自动化生产的要求,提高工作效率,保证系统的稳定性和连续性。堆料机的发展方向逐渐自动化、智能化,管理技术现代化。通过应用侧式悬臂堆料机的核心控制系统,实现设备无人值守、故障自诊断及远程中控室监控,真正实现料场堆取料机的智能化管理。
侧式悬臂堆料机的构造及原理
1、悬臂部分
悬臂架由两个变截面的工字型梁构成。横向用钢板连接成整体。工字型梁采用钢板焊接成型。 臂架上面安有胶带输送机,胶带机的传动采用电动滚筒。张紧装置设在头部卸料点处,使胶带保持足够的张力,张紧装置采用螺旋张紧。
堆料机的悬臂是进入堆场进行作业的部位,有旋转、俯仰等动作。悬臂前端垂吊两个料位探测仪。当料堆与探测仪接触时,探测仪发出信号, 传回控制室。控制室开动变幅液压系统,通过油缸推动悬臂提升一个预先给定的高度。两个探测仪,一个正常工作时使用,另一个用作极限保护。
2、行走机构
行走机构由三角形门架和行走驱动装置组成。三角形门架下端外侧与一套行走驱动装置(摆动端梁)铰接,内侧与一套行走驱动装置(固定端梁)刚性连接成一体,每个端梁配一套驱动装置,驱动装置共两套。每套驱动装置由一台三合一减速电机驱动。驱动装置实现软起动、延时制动。
3、来料车
来料车由卸料斗、斜梁、立柱等组成。卸料斗悬挂在斜梁前端,使物料通过卸料斗卸到悬臂的胶带面上。斜梁由两根焊接工字型梁组成,横向通过4根大小立柱支撑。大小立柱之间用工字型梁联接,工字型梁和斜梁之间又支撑2根小立柱。这样可保证卸料车的整体稳定性。
4、液压系统
液压系统实现悬臂的变幅运动。液压系统由液压站、油缸组成,液压站安装在三角形门架下部的平台上,而油缸支撑在三角形门架和悬臂之间。
5、电缆卷盘
1)动力电缆卷盘由单排大直径卷盘、集电滑环、减速器及力矩堵转电机组成。外界电源通过料场中部电缆坑由电缆通到卷盘上,再由卷盘通到堆料机配电柜。
2)控制电缆卷盘由单排大直径卷盘、集电滑环、减速器及力矩堵转电机组成。主要功能是把堆料机的各种联系反映信号通过多芯电缆与中控室联系起来。
6、操作
堆料机采用三种操作方式,即自动控制、机上人工控制和机旁(维修)控制。 每种操作是通过工况转换开关实现的。
1)机上人工控制 ---- 机上人工控制适用于调试过程中所需要的工况和自动控制出现故障,操作人员在机上控制室内通过控制堆料作业。当工况开关置于人工控制时,自动、机旁(维修)工况均不能切入,机上人工控制可对悬臂上卸料胶带机、液压系统、行走系统进行单独的启停操作,各系统之间失去相互连锁,但各系统的各项保护仍起作用。
2)自动控制 ---- 自动控制是指堆料机实现无人控制,通过监控系统监视堆料机工作的状态。自动控制方式下的堆料作业由中控室和机上控制室均可实施。当需要中控室对堆取料机自动控制时,操作人员只要把操作台上的自动操作按钮按下,然后按下起动按钮,堆料机上所有的用电设备将按照预定的程序起动,整机操作投入正常自动运行作业状态。在中控室的操作台上,通过按动按钮可以对堆取料机实现整机系统的起动或停车。
在自动控制状态下起机前首先响铃,起动顺序是:1)起动悬臂上的卸料皮带机;2)起动液压系统;3)起动堆料皮带机;4)起动电缆卷盘;5)起动行走机构.
7、正常停车顺序:
1)停止上料皮带机;2)停止悬臂上的卸料皮带机;3)停止行走机构;4)停止电缆卷盘。
总之
预均化堆场应用于冶金、电力、钢铁、化工和能源等行业,侧式悬臂堆料机是目前预均化堆场中采用广泛的侧面堆料机。
相关产品:侧式悬臂堆料机
_240_180.jpg) 侧式悬臂堆料机
侧式悬臂堆料机
